 中文
中文 ENG
ENG








小优智能科技有限公司成立于2015年底,是一家专注于高精度3D机器视觉模组研发、生产及销售的高科技企业。
公司自主研发的3D机器视觉模组采用激光/DLP白光编码光栅结构光+双工业相机方案,还原物体三维信息,广泛应用于消费电子领域、工业领域和安防领域,具有精度高、速度快、成本低的优势。
支持近20个机器人品牌
公司研发的系列产品已广泛应用于工业领域、消费电子领域、安防领域

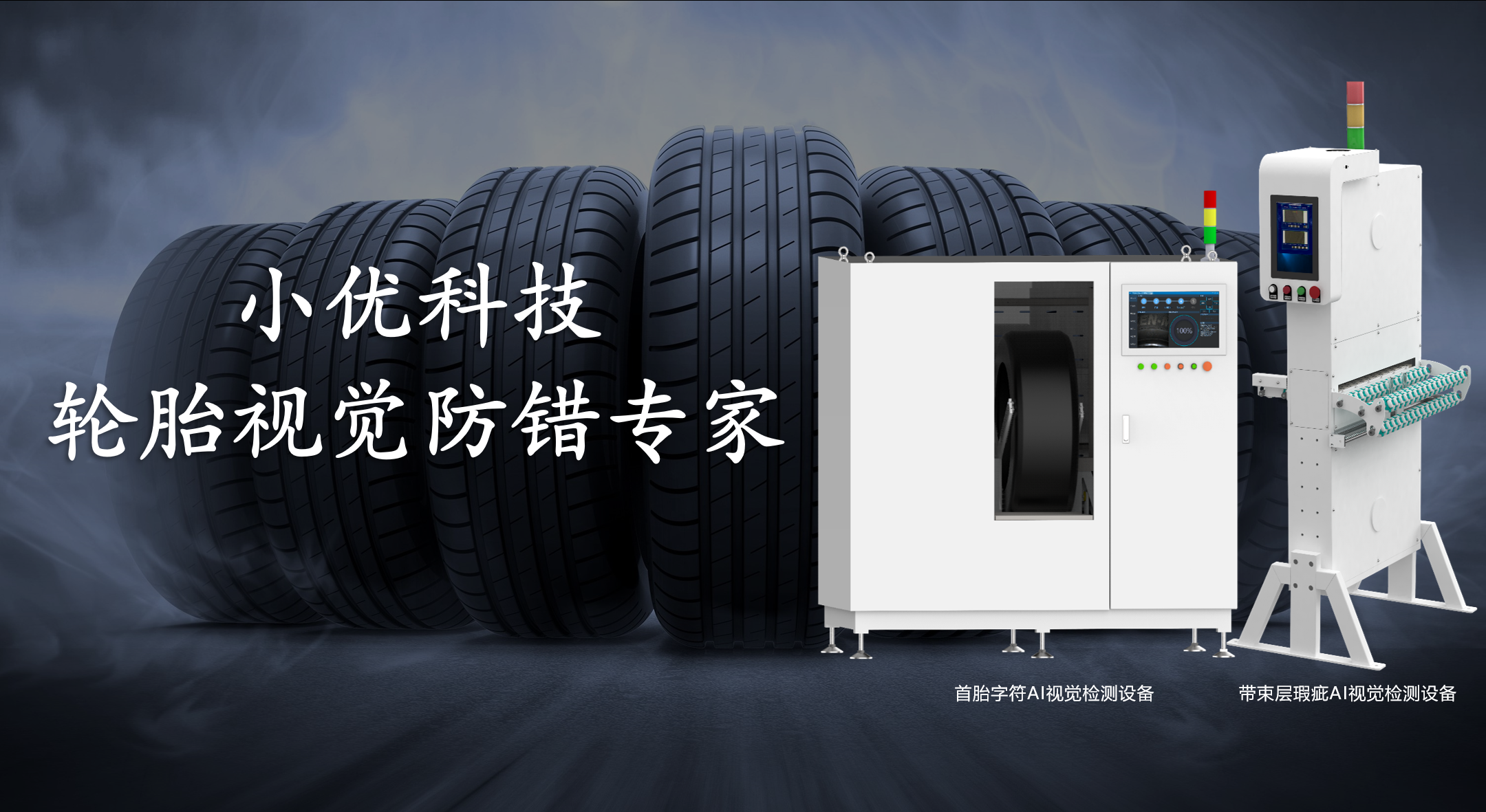
随着工业4.0的兴起及中国制造2025规划的提出,工业生产必将朝着自动化、智能化的方向发展。线体的工业机器人自动化生产为必然,而3D机器视觉产品及系统是其中重要的一项。
探索更多 +
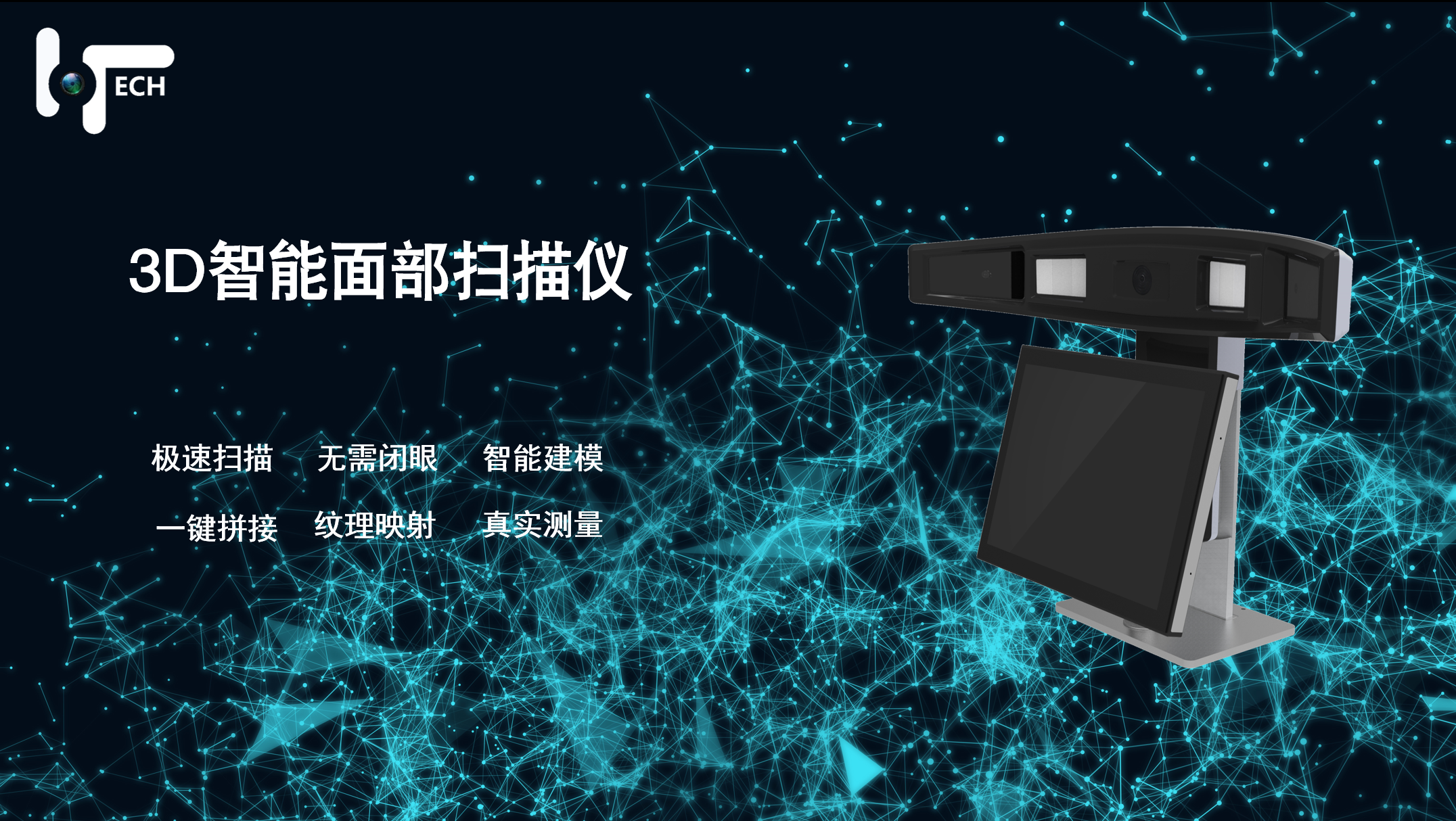
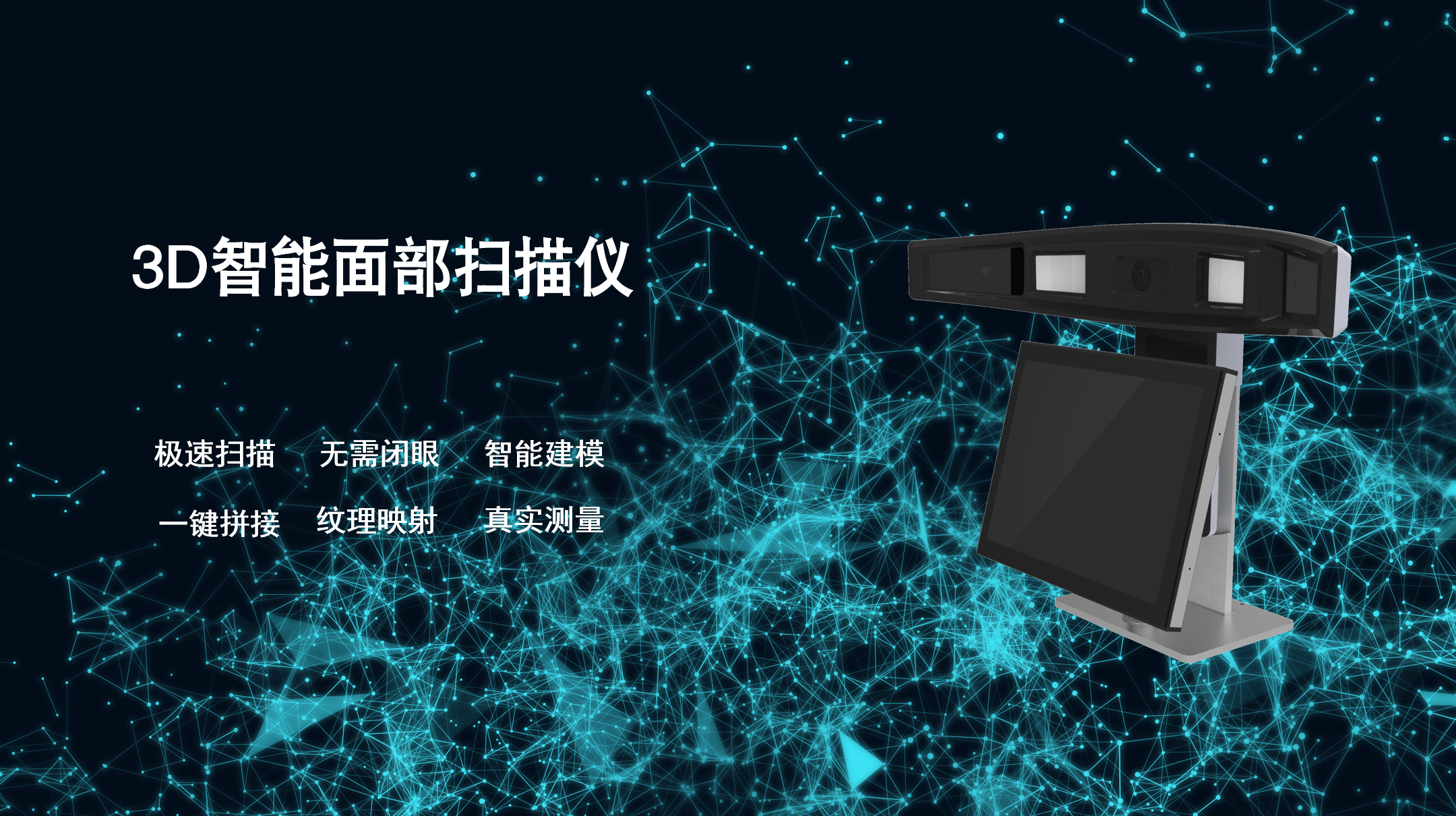
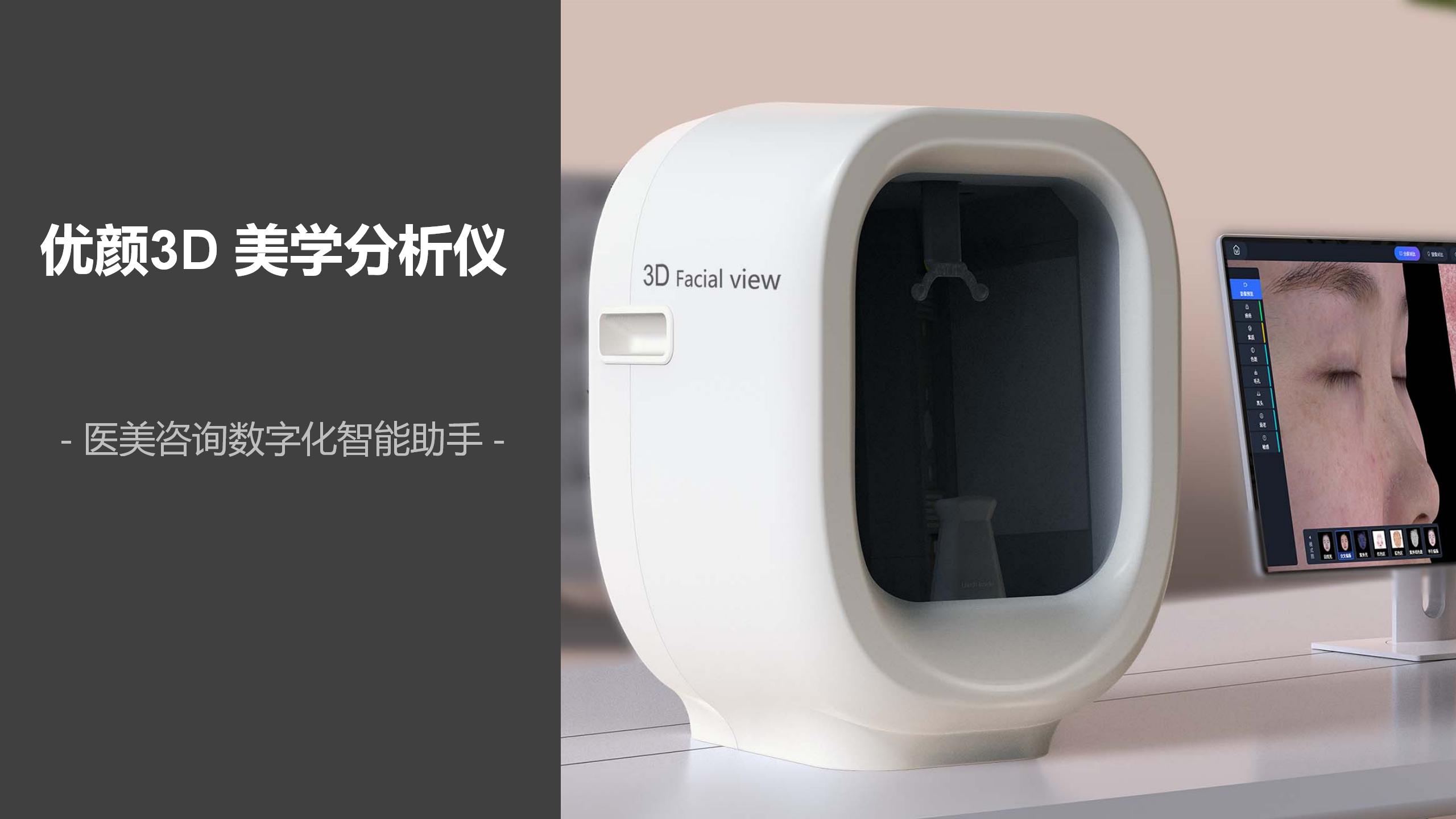
在消费领域,3D相机的应用已然成为当下最热门的技术领域,小优智能科技的3D相机方案在消费领域主要应用在识别类电子产品、医疗美容等方面。
探索更多 +
小优自主研发的高精度3D相机设备赋能公安系统,高精度三维痕迹提取仪已经实现列装,基于高精度三维人脸的智能鉴定系统也已经获得重大专项支持。
探索更多 +随着工业4.0的兴起及中国制造2025规划的提出,工业生产必将朝着自动化、智能化的方向发展。线体的工业机器人自动化生产为必然,而3D机器视觉产品及系统是其中重要的一项。
探索更多 +在消费领域,3D相机的应用已然成为当下最热门的技术领域,小优智能科技的3D相机方案在消费领域主要应用在识别类电子产品、医疗美容等方面。
探索更多 +小优自主研发的高精度3D相机设备赋能公安系统,高精度三维痕迹提取仪已经实现列装,基于高精度三维人脸的智能鉴定系统也已经获得重大专项支持。
探索更多 +小优科技致力于成为视觉识别行业独角兽企业,为中国高端装备提供明眸慧眼,引领未来智慧生活!
目前小优已与中车集团、凌云光、西门子、国机集团、中兴国际等标杆客户建立合作,为其提供全方位的3D视觉技术服务,
成功合作动车底盘自动检测仪、自动加油机、自动挤奶机、自动抹墙机等项目。
























